Robotique industrielle
La robotique industrielle représente l’un des leviers les plus puissants pour transformer un atelier de production. Qu’il s’agisse d’assembler des composants électroniques avec une précision de quelques dixièmes de millimètre, de souder des carrosseries automobiles à cadence élevée ou de trier des milliers de produits alimentaires par minute, les robots industriels sont devenus des partenaires incontournables de l’industrie moderne.
Pourtant, derrière cette apparente simplicité se cache une réalité technique complexe. Choisir le bon type de robot, dimensionner correctement une cellule, garantir la sécurité des opérateurs sans paralyser la production : autant de défis qui nécessitent une compréhension solide des fondamentaux. C’est précisément l’objectif de cet article : vous offrir une vision d’ensemble claire et actionnable, que vous soyez responsable de production, ingénieur méthodes ou simplement curieux de comprendre comment ces machines façonnent l’industrie.
Nous allons explorer les différentes familles de robots, leurs domaines d’application privilégiés, les enjeux d’intégration et les bonnes pratiques qui font la différence entre un investissement rentable et une installation sous-exploitée.
Pourquoi la robotique industrielle transforme-t-elle les ateliers de production ?
Imaginez une ligne de production où chaque geste répétitif est exécuté avec la même précision, 24 heures sur 24, sans fatigue ni variation. C’est la promesse fondamentale de la robotique industrielle. Mais au-delà de cette image, les bénéfices concrets sont multiples et mesurables.
Un robot industriel bien intégré permet typiquement d’atteindre des gains de productivité de 20 à 40 % sur les opérations ciblées. Plus important encore, il libère les opérateurs des tâches les plus pénibles, réduisant significativement les troubles musculo-squelettiques (TMS) qui représentent une part majeure des maladies professionnelles en milieu industriel.
La question n’est plus de savoir si l’automatisation est pertinente, mais comment l’implémenter intelligemment. Car une ligne qui plafonne à 80 % de sa capacité théorique cache souvent des problèmes d’intégration, de programmation ou de maintenance qu’il est possible de résoudre avec les bonnes méthodes.
Les grandes familles de robots industriels
Tous les robots ne se valent pas, et chacun excelle dans son domaine. Comprendre leurs spécificités permet de faire le bon choix dès le départ, évitant ainsi des erreurs coûteuses.
Le bras articulé 6 axes : la polyvalence incarnée
Véritable couteau suisse de la robotique, le bras 6 axes peut atteindre n’importe quel point dans son enveloppe de travail selon n’importe quelle orientation. Cette flexibilité en fait le choix privilégié pour la soudure, la peinture, l’assemblage complexe ou la manipulation de pièces lourdes.
Son principal défi réside dans la rentabilisation sur petites séries. Contrairement aux idées reçues, il est tout à fait possible de rentabiliser un bras 6 axes sur des lots de moins de 500 pièces, à condition de maîtriser les temps de changement de série et d’adopter une programmation modulaire réutilisable.
Le robot SCARA : champion de l’assemblage rapide
Avec ses quatre axes et sa structure rigide sur l’axe vertical, le robot SCARA excelle dans les opérations d’assemblage, de vissage et de pick-and-place nécessitant une précision verticale. Son architecture lui confère une rigidité naturelle en Z, idéale pour les opérations d’emmanchement ou d’insertion par pression.
Attention cependant à la zone morte arrière lors de l’implantation : cette contrainte géométrique est souvent sous-estimée et peut compromettre l’accessibilité de la cellule.
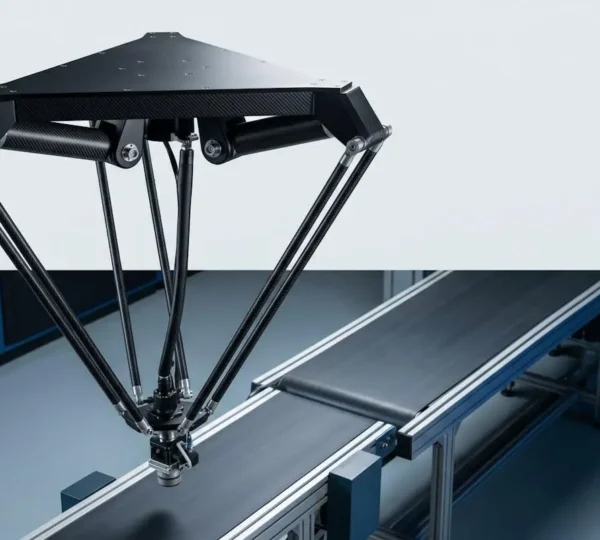
Le robot Delta : imbattable en cadence légère
Reconnaissable à sa structure en araignée suspendue, le robot Delta atteint des cadences spectaculaires, parfois supérieures à 150 cycles par minute. Il règne en maître sur les applications de tri, de conditionnement et de manipulation de produits légers (typiquement moins de 1 kg).
Sa conception impose toutefois des contraintes strictes : dépasser la charge nominale détériore rapidement les rotules, et son encombrement vertical reste important malgré une course utile relativement réduite.
Les AGV et AMR : la logistique en mouvement
Les véhicules à guidage automatique (AGV) et les robots mobiles autonomes (AMR) révolutionnent la logistique interne. Qu’ils soient filoguidés ou à navigation laser, ils permettent de fluidifier les flux de matières sans intervention humaine constante.
Le déploiement d’une flotte d’AGV dans un entrepôt existant soulève des questions pratiques : choix du système de guidage, gestion de la cohabitation avec les piétons, stratégie de recharge des batteries. Des réponses adaptées existent pour chaque configuration.
Les cobots : la collaboration homme-robot
Les robots collaboratifs, ou cobots, sont conçus pour travailler à proximité immédiate des opérateurs sans barrière physique. Leur technologie PFL (Power and Force Limiting) détecte les contacts et limite instantanément les forces appliquées, conformément à la norme ISO/TS 15066.
Cette collaboration impose cependant de repenser l’outillage : un cobot intrinsèquement sûr équipé d’un outil tranchant redevient dangereux. La sécurité se conçoit globalement, jamais isolément.
Comment réussir l’intégration d’une cellule robotisée ?
L’achat d’un robot ne représente qu’une fraction du projet. L’intégration dans l’environnement existant conditionne largement le succès de l’investissement.
Anticiper les contraintes d’espace
Intégrer une cellule robotisée dans un atelier exigu exige une réflexion approfondie sur l’implantation. Les distances de sécurité, calculées selon la vitesse d’approche et le temps de réponse du système, déterminent l’encombrement réel de l’installation. Une barrière immatérielle mal positionnée de quelques centimètres peut provoquer des arrêts intempestifs à chaque passage.
Choisir les bonnes protections
Grillage ou carter plein ? Le choix dépend des nuisances à contenir : projections, bruit, poussières. Les portes d’accès doivent être équipées de serrures de sécurité fiables, conçues pour décourager les tentatives de contournement qui finissent toujours par survenir sous la pression de la production.
Prévoir la flexibilité
Une cellule bien conçue intègre des connecteurs modulaires permettant un démontage et un déplacement rapides. Cette flexibilité devient précieuse lors des réorganisations d’atelier ou des évolutions de production.
Sécurité et normes : l’équilibre entre protection et productivité
La sécurité en robotique industrielle ne se limite pas à poser des barrières. Elle implique une compréhension fine des risques et des normes applicables.
La norme ISO/TS 15066 définit notamment les seuils de force et de pression acceptables selon les zones du corps impactées. Un choc sur le front est ainsi moins toléré qu’un contact sur l’épaule, car les conséquences biomécaniques diffèrent radicalement. Ces données alimentent le paramétrage des cobots et le dimensionnement des distances de sécurité.
Les vibrations environnantes méritent également attention : le passage d’un chariot élévateur peut déclencher l’arrêt d’un cobot trop sensible. Trouver le juste réglage entre réactivité sécuritaire et continuité de production demande une phase de mise au point soignée.
Maintenance et programmation : les piliers de la performance durable
Un robot performant le jour de sa mise en service peut rapidement décevoir si la maintenance et la programmation sont négligées.
Maintenance prédictive ou curative ?
La maintenance curative, qui intervient après la panne, reste malheureusement répandue. Pourtant, des signes avant-coureurs existent : usure des faisceaux de câbles au niveau de l’axe 6, jeu dans les réducteurs, micro-fissures sur les bras carbone des robots Delta après un crash.
La maintenance prédictive, basée sur l’analyse des données de fonctionnement, permet d’anticiper ces défaillances et de planifier les interventions sans arrêt non programmé.
Programmation modulaire et réutilisable
Les temps de changement de série tuent la rentabilité des robots polyvalents. La solution passe par une programmation modulaire où les blocs fonctionnels sont réutilisables à 90 %. Cette approche réduit drastiquement les temps de mise en production et sécurise la qualité des trajectoires.
Applications sectorielles : de l’automobile à l’agroalimentaire
Chaque secteur industriel présente des exigences spécifiques qui façonnent les solutions robotiques déployées.
L’automobile et le ferrage
L’assemblage d’une caisse automobile mobilise plusieurs robots coordonnés pour assembler des centaines de pièces de tôle avec des tolérances de l’ordre du demi-millimètre. La gestion des dilatations thermiques lors de la soudure, la synchronisation des trajectoires pour éviter les collisions et la flexibilité permettant de basculer d’un modèle à l’autre constituent les défis majeurs de ces installations.
L’agroalimentaire et le packaging haute cadence
Dans l’agroalimentaire, les robots doivent composer avec des contraintes d’hygiène strictes : lubrification avec des graisses alimentaires certifiées H1, résistance aux lavages haute pression quotidiens. Les cadences extrêmes imposent une synchronisation parfaite avec les convoyeurs et une maîtrise des temps de réponse pneumatique à la milliseconde près.
La robotique industrielle offre des possibilités considérables pour qui sait l’appréhender méthodiquement. Chaque type de robot, chaque configuration de cellule, chaque stratégie de maintenance répond à des logiques précises qu’il convient de maîtriser. Les articles détaillés de cette catégorie vous permettront d’approfondir chacun de ces aspects selon vos besoins spécifiques.
Robot Delta : l’équation de la vitesse pure pour le tri léger et ses points de rupture
La vitesse extrême du robot Delta est un compromis mécanique : chaque gain de cadence se paie par une sensibilité accrue à la charge, une enveloppe de travail réduite et des contraintes de maintenance précises. L’architecture parallèle offre une rigidité…
Lire la suite
Packaging haute vitesse : comment atteindre 150 coups/minute sans transformer vos biscuits en miettes ?
Atteindre 150 coups/minute n’est pas une question de vitesse brute, mais de chasse obsessionnelle aux millisecondes gaspillées à chaque micro-étape du cycle. La synchronisation prédictive avec le convoyeur est plus décisive que la vitesse de pointe du robot. Un outil…
Lire la suite
Géométrie caisse : comment assembler 300 pièces de tôle avec une précision de +/- 0.5mm ?
Atteindre une précision de +/- 0.5mm sur une caisse en blanc n’est pas la simple performance d’un robot, mais la maîtrise d’un système où chaque milliseconde et chaque degré comptent. La géométrie est d’abord définie par la contrainte mécanique statique…
Lire la suite
Mon cobot PFL s’arrête sans arrêt : décoder les causes pour allier sécurité et productivité
Les arrêts constants de votre cobot PFL ne sont pas un bug, mais un signal que son réglage de sécurité est inadapté à son environnement réel ou à sa tâche. La sensibilité du cobot est un équilibre délicat entre la…
Lire la suite
Comment intégrer une cellule robotisée dans un atelier exigu sans sacrifier la sécurité ?
Intégrer une cellule robotisée dans 10m² n’est pas un problème de normes, mais un exercice d’arbitrage spatial et de conception intelligente. Chaque choix de protection (grillage, barrière, carter) a un impact direct sur l’empreinte au sol et l’opérabilité. La prévention…
Lire la suite
Pourquoi choisir un robot SCARA plutôt qu’un Delta pour l’assemblage vertical précis ?
Contrairement à l’idée reçue, le choix entre SCARA et Delta ne se résume pas à un duel vitesse contre rigidité. La décision se joue sur les compromis physiques invisibles. L’architecture SCARA offre une rigidité verticale supérieure, mais son point faible…
Lire la suite
Comment déployer une flotte d’AGV dans un entrepôt encombré sans refaire tout le sol ?
Déployer des AGV dans un entrepôt ancien est possible sans une rénovation complète, à condition de traiter l’existant comme la priorité numéro un. Le choix du guidage doit privilégier la robustesse face aux contraintes réelles (poussière, sol inégal) plutôt que…
Lire la suite
Comment rentabiliser un bras robotique 6 axes sur des séries de moins de 500 pièces ?
Cesser de subir la flexibilité et commencer à la piloter : la rentabilité d’un robot sur des petites séries ne vient pas de sa polyvalence théorique, mais d’une chasse obsessionnelle aux micro-temps morts. Les temps de changement de série, et…
Lire la suite
Comment automatiser votre production en site occupé sans perdre 3 semaines de chiffre d’affaires ?
L’échec d’un projet de modernisation en site occupé ne vient pas de la technologie, mais de l’oubli d’un seul détail : les interfaces entre l’ancien et le nouveau. Votre ligne actuelle est probablement bien plus inefficace que vous ne le…
Lire la suite