IA & Robotique avancée
L’intelligence artificielle et la robotique avancée ne relèvent plus de la science-fiction. Ces technologies transforment aujourd’hui les ateliers de production, les blocs opératoires et les centres de rééducation. Elles permettent à des machines d’accomplir des tâches autrefois réservées à l’humain : reconnaître une pièce défectueuse parmi des milliers, manipuler un objet fragile sans le briser, ou assister un chirurgien avec une précision sub-millimétrique.
Pourtant, derrière ces prouesses se cachent des défis techniques considérables. Comment un robot peut-il saisir une pièce en vrac dans un bac sombre ? Pourquoi certains projets d’automatisation échouent-ils malgré des investissements importants ? Quelles précautions prendre avant de faire cohabiter un cobot avec des opérateurs humains ? Autant de questions auxquelles cet article apporte des éclairages concrets.
Que vous soyez dirigeant de PME, ingénieur de production ou simplement curieux des mutations technologiques en cours, cette ressource vous offre une vision structurée des concepts fondamentaux, des applications pratiques et des critères de choix essentiels dans ce domaine en pleine expansion.
Pourquoi l’IA et la robotique avancée transforment-elles l’industrie ?
La convergence entre intelligence artificielle et robotique redéfinit les règles du jeu industriel. Contrairement aux automates programmables traditionnels qui répètent indéfiniment la même séquence, les systèmes modernes s’adaptent à leur environnement. Un robot équipé de vision 3D et d’algorithmes d’apprentissage peut traiter des pièces de formes variées sans reprogrammation complète.
Cette flexibilité intéresse particulièrement les PME de moins de 50 salariés, longtemps exclues de l’automatisation par des coûts prohibitifs et des contraintes de volume. Les modèles économiques ont évolué : le RaaS (Robot as a Service) permet désormais de louer un système robotique plutôt que de l’acheter, préservant ainsi la trésorerie tout en testant la pertinence de l’investissement.
Calculer le retour sur investissement robotique sur trois ans exige cependant de ne pas négliger les coûts cachés : formation des équipes, maintenance préventive, adaptation des postes de travail, et parfois mise en conformité des installations électriques. Les projets qui échouent souffrent souvent d’un déficit d’accompagnement managérial plutôt que de limitations techniques.
La cobotique : quand les robots deviennent des coéquipiers
Le terme cobot désigne un robot collaboratif conçu pour travailler à proximité immédiate des opérateurs humains, sans barrière de sécurité physique. Contrairement aux robots industriels classiques, les cobots intègrent des capteurs de force et des logiques d’arrêt qui limitent les risques de blessure en cas de contact.
Choisir entre cobot et robot industriel
Pour des charges inférieures à 10 kg et des cadences modérées, le cobot représente souvent la solution la plus pertinente. Son installation simplifiée et sa programmation intuitive — parfois réalisable en quelques minutes par démonstration gestuelle — réduisent considérablement le temps de déploiement. En revanche, pour des applications nécessitant vitesse maximale ou charges lourdes, le robot industriel traditionnel reste incontournable.
Sécurité : au-delà des idées reçues
Une erreur fréquente consiste à considérer qu’un cobot est « sûr par défaut ». En réalité, chaque application nécessite une analyse de risque spécifique. Un cobot manipulant un outil tranchant ou une pièce aux arêtes vives peut causer des blessures même à vitesse réduite. La réglementation impose de brider la vitesse et la force selon les zones de contact potentielles avec l’opérateur.
L’acceptation par les équipes
Le succès d’un projet cobotique dépend largement de l’adhésion des opérateurs. Présenter le cobot comme un « collègue » qui soulage des tâches répétitives ou pénibles favorise son acceptation. Impliquer les équipes dès la phase de conception et valoriser leur expertise dans le paramétrage du système transforme une résistance potentielle en engagement.
La vision industrielle : donner des yeux au robot
Sans système de vision, un robot reste aveugle. Il ne peut manipuler que des pièces positionnées avec une précision parfaite. La vision 3D change radicalement cette limitation en permettant au robot de localiser des objets dans l’espace, même disposés de manière aléatoire.
Technologies de capteurs 3D
Plusieurs technologies coexistent, chacune avec ses avantages :
- Stéréovision : deux caméras imitant la vision humaine, efficace mais sensible aux surfaces uniformes
- Temps de vol (ToF) : mesure la distance par le temps de retour d’un signal lumineux, robuste mais résolution limitée
- Lumière structurée : projection de motifs analysés par déformation, précis mais sensible aux reflets
- Triangulation laser : excellente précision sur pièces métalliques brillantes
Le choix dépend de l’application : des pièces noires sur fond noir exigeront une technologie différente de pièces métalliques réfléchissantes. L’éclairage ambiant — notamment la lumière du soleil traversant les fenêtres de l’atelier — peut perturber significativement les mesures et nécessite des filtres ou un positionnement adapté.
Le défi du bin-picking
Le dévracage (bin-picking) illustre parfaitement la complexité de la vision robotique. Saisir une pièce unique dans un bac rempli de pièces en vrac semble trivial pour un humain, mais représente un défi majeur pour un robot. L’algorithme doit identifier chaque pièce, calculer un point de prise accessible, puis générer une trajectoire évitant les collisions avec les parois du bac et les autres pièces. Atteindre 99 % de réussite de prise exige une optimisation fine de chaque paramètre.
L’intelligence artificielle au service de la production
L’IA industrielle ne se limite pas aux robots. Elle englobe la détection de défauts, la maintenance prédictive et l’optimisation des processus. La question centrale reste : quand l’apprentissage automatique devient-il plus rentable que la programmation classique ?
Machine learning vs règles programmées
Pour des défauts bien définis et stables, un simple algorithme à base de règles (« si la dimension dépasse X, rejeter ») suffit. Le machine learning prend tout son sens face à des variations subtiles, des défauts mal caractérisés ou des conditions changeantes. L’apprentissage non-supervisé permet même de détecter des anomalies inconnues, jamais rencontrées auparavant.
Le problème des données
Les modèles d’IA échouent souvent à cause de données de mauvaise qualité. Les vieux automates génèrent des données incomplètes, mal horodatées ou stockées dans des formats propriétaires. Nettoyer et structurer ces données représente parfois 80 % du travail d’un projet d’IA industrielle.
IA embarquée : l’intelligence au plus près du robot
Envoyer les images de production vers le Cloud pose des problèmes de latence, de confidentialité et de dépendance réseau. L’IA embarquée (Edge AI) exécute les algorithmes directement sur le robot ou à proximité. Des processeurs spécialisés comme les cartes Jetson ou les TPU permettent de faire tourner des réseaux de neurones complexes avec une consommation énergétique réduite. Les 200 millisecondes gagnées peuvent faire la différence entre éjecter une pièce défectueuse à temps ou la laisser passer.
Les interfaces homme-robot de nouvelle génération
La commande par boutons et joysticks cède progressivement la place à des interactions plus naturelles. Un opérateur aux mains occupées peut désormais piloter un robot par la voix ou le geste, à condition que le système filtre efficacement le bruit ambiant d’un atelier — parfois supérieur à 90 dB.
Les gants connectés offrent un retour haptique permettant de « sentir » ce que le robot touche à distance. Cette sensation devient cruciale pour les opérations délicates où la pression appliquée détermine le succès de la manipulation. Certains systèmes anticipent même les besoins de l’opérateur, tendant la pièce suivante avant qu’il ne la demande explicitement.
Robotique médicale : du bloc opératoire à la rééducation
Le domaine médical illustre les exigences les plus strictes de la robotique avancée. Un robot chirurgical doit filtrer les tremblements naturels de la main du chirurgien tout en transmettant un retour de force permettant de percevoir la résistance des tissus. La latence maximale tolérée pour une téléopération est d’environ 200 ms — au-delà, le risque de geste inadapté devient critique.
Exosquelettes de rééducation
Les exosquelettes exploitent la neuroplasticité pour réapprendre au cerveau à commander un membre affaibli. L’alignement précis des axes biomécaniques conditionne l’efficacité et la sécurité : un mauvais positionnement au niveau du genou peut aggraver les lésions plutôt que les corriger. Les algorithmes détectent les pertes d’équilibre avant qu’elles ne se produisent, et les serious games motivent les patients en transformant les exercices en défis ludiques.
Contraintes réglementaires
Obtenir le marquage CE médical pour un dispositif intégrant de l’IA représente un parcours exigeant. Il faut démontrer que l’algorithme ne mettra pas le patient en danger, documenter exhaustivement son comportement et prévoir des modes de défaillance sécurisés.
L’IA et la robotique avancée ouvrent des perspectives considérables, de l’atelier industriel au centre de rééducation. La réussite des projets dépend autant de la maîtrise technique que de l’accompagnement humain, de la qualité des données et du respect des contraintes réglementaires. Chaque application mérite une analyse approfondie pour identifier la combinaison technologique la mieux adaptée à ses spécificités.

Exosquelette de rééducation : comment le robot réapprend-il au cerveau à marcher (Neuroplasticité) ?
L’efficacité d’un exosquelette de rééducation ne réside pas dans sa force, mais dans sa capacité à devenir un partenaire d’apprentissage pour le système nerveux du patient. Le robot agit comme un pédagogue, alternant assistance totale et autonomie progressive pour stimuler…
Lire la suite
Robotique chirurgicale : bien plus que la suppression du tremblement
La véritable innovation en robotique chirurgicale ne réside pas seulement dans la suppression du tremblement, mais dans la résolution de défis techniques et réglementaires invisibles qui redéfinissent les limites de la sécurité et de l’efficacité au bloc opératoire. La viabilité…
Lire la suite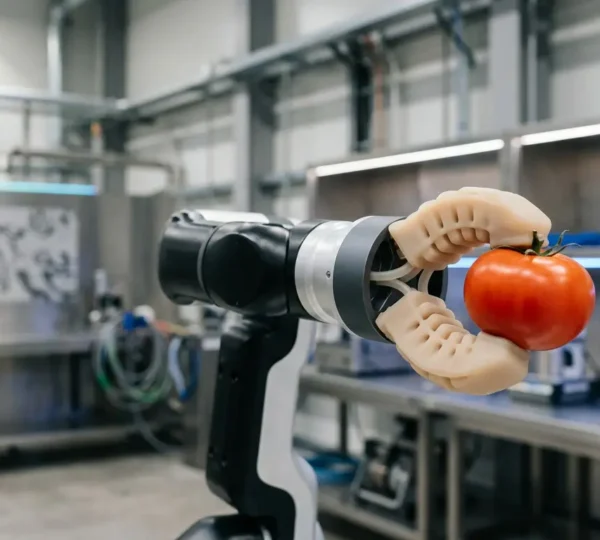
Préhension d’objets déformables : comment robotiser la manipulation de fruits ou de sachets souples ?
La manipulation robotisée d’objets fragiles et déformables, comme les fruits ou les sachets, n’est pas qu’une question de choix du bon préhenseur. Le véritable défi, pour un ingénieur, réside dans la maîtrise de la physique sous-jacente et la capacité à…
Lire la suite
IA embarquée (On-Device AI) : pourquoi ne pas envoyer vos images de production dans le Cloud ?
Traiter les données IA sur le robot n’est pas une optimisation, mais une décision stratégique de contrôle et de souveraineté sur vos actifs les plus critiques. La latence n’est plus un délai, elle devient une capacité d’action physique en temps…
Lire la suite
Commande gestuelle et vocale : gadget futuriste ou réelle productivité pour l’opérateur mains occupées ?
La commande gestuelle et vocale n’est pas une simple alternative au clavier, c’est une extension cognitive de l’opérateur qui décuple sa performance. Elle réduit la charge mentale et supprime les micro-interruptions de tâches qui dégradent l’efficacité. Elle s’appuie sur des…
Lire la suite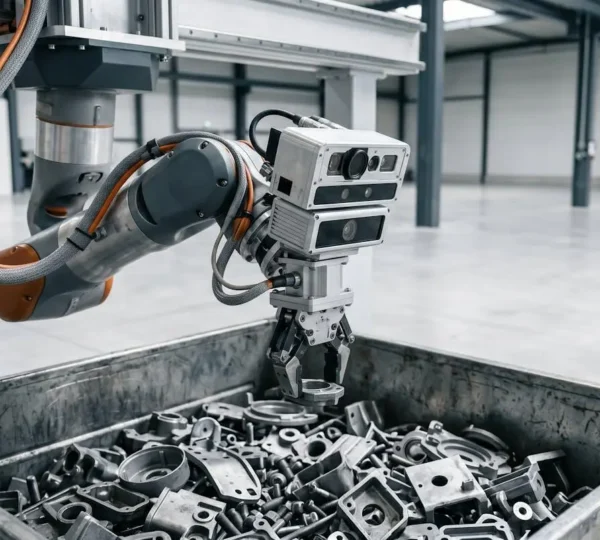
Bin-picking (Dévracage) : pourquoi est-ce si difficile d’atteindre 99% de réussite de prise ?
Atteindre 99% de réussite en dévracage n’est pas une quête de la technologie parfaite, mais un exercice de gestion des imperfections inévitables de la production. La performance ne réside pas dans un composant unique (caméra, robot) mais dans la synergie…
Lire la suite
Guidage 3D : pourquoi la 2D ne suffit plus pour saisir des pièces dans des conditions variables ?
Le véritable échec de la vision 2D face à la variabilité n’est pas son manque de profondeur, mais son incapacité à quantifier le désordre d’un environnement de production réel. Les facteurs environnementaux (lumière, reflets) et la disposition des pièces (empilement,…
Lire la suite
Machine Learning vs Programmation classique : quand l’IA devient-elle plus rentable que le code IF-THEN ?
La rentabilité de l’IA industrielle ne se mesure pas au coût de développement, mais au « Coût de l’Inflexibilité » (COI) qu’elle élimine par rapport au code rigide. La programmation `IF-THEN` est un actif qui se déprécie, créant une dette technique coûteuse…
Lire la suite
Comment vider un bac de pièces en vrac avec un robot sans bol vibrant bruyant ?
Remplacer un bol vibrant par un robot de dévracage (bin picking) n’est pas un défi matériel, mais un problème de maîtrise de la géométrie 3D, de la lumière et du temps de calcul. Le succès dépend du choix de la…
Lire la suite
Pourquoi choisir un cobot plutôt qu’un robot industriel classique pour des charges de moins de 10kg ?
Pour une PME, choisir un cobot n’est pas une question de charge utile, mais une décision stratégique pour une automatisation centrée sur l’humain et facile à intégrer. Il est conçu pour être programmé et piloté par les opérateurs eux-mêmes, sans…
Lire la suite